注释
|
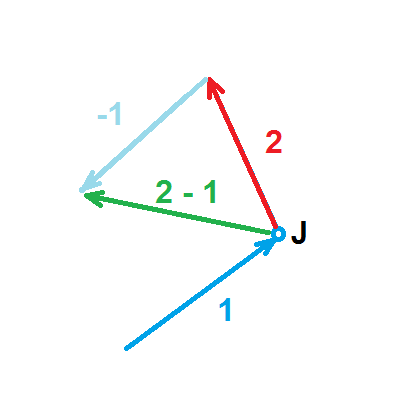
这是在计算交界处的速度差。通过获取新的段向量并减去先前的向量,我们得到指向加速度方向的向量。这是将以前的速度更改为新速度的加速度。(见图表)循环遍历每个轴以执行完整的向量数学运算。
然后在第 445 行使用此值进行归一化(缩放为单位幅度),并在第 446 行计算加速度的单位矢量(缩放以保持在轴限制以下)。 |
贡献者
|
@Eric-Hsia:看到这个。 |
作者
|
@MechaSteve @chamnit非常感谢 |


|
这是在计算交界处的速度差。通过获取新的段向量并减去先前的向量,我们得到指向加速度方向的向量。这是将以前的速度更改为新速度的加速度。(见图表)循环遍历每个轴以执行完整的向量数学运算。
然后在第 445 行使用此值进行归一化(缩放为单位幅度),并在第 446 行计算加速度的单位矢量(缩放以保持在轴限制以下)。 |
|
@Eric-Hsia:看到这个。 |
|
@MechaSteve @chamnit非常感谢 |




大家
好,谁能帮我解释一下下面的代码:在 planner.c line 433
junction_unit_vec[idx] = unit_vec[idx]-pl.previous_unit_vec[idx];
谢谢