

注释
|
干得好,这正是我想要的。 |
|
今天晚些时候我将订购大约 10 个原始电路板和一个焊锡模板。在固件更改完成之前,控制器将无法工作。 最重要的变化是SPI级联模式。这需要TMCStepper 库添加该功能。有一个问题 悬而未决。没有时间表,所以我可能需要暂时将原始字节发送到 SPI,而不是更友好和可读的库。 额外的轴需要添加到 Grbl_ESP32。我已经在其他 Grbl 端口上做到了,所以这应该不是什么大问题。我将有一个选项,其中两个轴可以组合/平方,这样 ShapeOko/X-Carve 风格的机器就可以受益。 编辑:该设计是开源的,我将很快为其创建一个 GitHub 存储库。 |
|
非常感谢,我将等待他们(固件和 GitHub 存储库)。 |
|
我得到了一些基本的菊花链 SPI 驱动程序功能。我只有两个 TMC5160 驱动程序。我只是对 TMCStepper 库进行了一些修改以使其正常工作。现在它只是向所有驱动程序发送相同的配置。 |

|
哇,我现在太兴奋了,我的机器还在等着呢。 |
ESP32 的最大轴数是多少? |

|
我让 Grbl 在不同的端口上运行多达 6 个。 当前的 Grbl_ESP32 限制为 3 个,但我会尽快添加 3 个。 |
|
据我所知,此时此 PCB+ESP32 与其他替代方案https://reprap.org/wiki/MiniRambo相似? 另一方面,ESP32 与 Arduino 相比,CPU 功率的增加是否意味着最快的工作? |
|
虽然这两块板都可以用软件控制多个步进电机来解码 g 代码,但这两块板无论如何都不相关。它们不仅具有不同的处理器(8 位 miniRambo 与 32 位 ESP32)以及 RAM 和闪存的巨大差异,而且 miniRambo 针对 3D 打印机,而 PCB+ESP32 针对高达 4 轴和/或激光的 CNC 机器雕刻师/切割师。或者当然,更快的处理器意味着脉冲最大频率可以更高。
|
|
为该项目选择 ESP32 主要是因为蓝牙和 WiFi 功能,但事实证明它在其他方面也很出色。
|
|
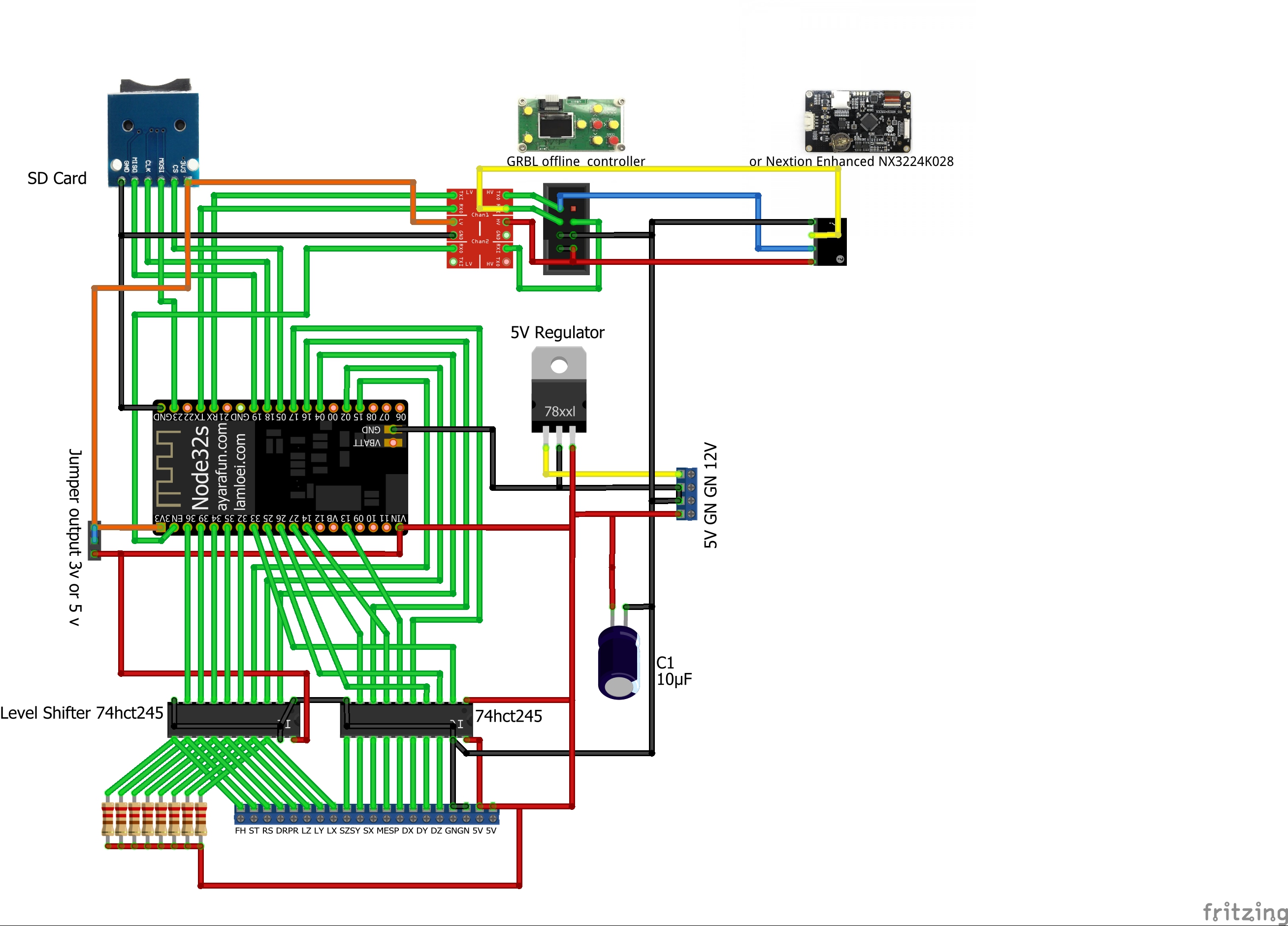
你好! 我为 GRBL ESP32 项目设计了另一个版本的 PCB – 这次它在输入端使用光耦合器,在输出端使用 pnp 晶体管。它旨在与外部步进电机驱动器(如 DM5042 或类似产品)一起使用,这些驱动器在其(STEP、DIR ENABLE)输入端具有光耦合器。 它使用当前版本的软件并且功能仅限于此版本(仅 3 个轴 – ESP32 上没有更多的引脚来制作额外的轴而不添加更多的 IC – 比如 I2C 扩展器或类似的东西)。 最好的祝福 |



|
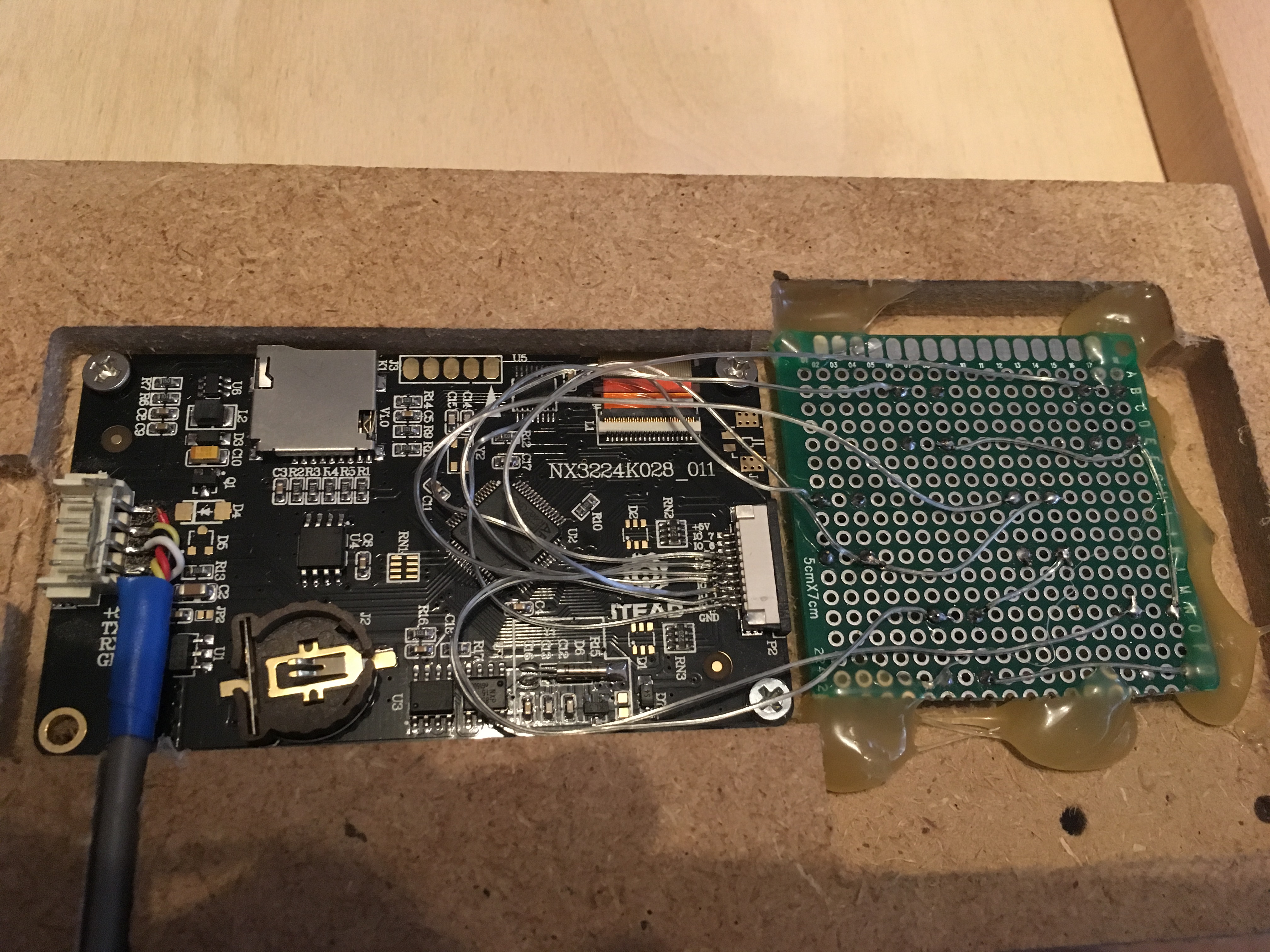
@JackHouseLab我想当你提到没有更多的引脚时你已经回答了这个问题,但是有机会在板上保留 SD 卡,即使引脚与第二个功能共享可能会派上用场。 无论如何,对于大型 CNC 机器来说,这是一个非常好的补充。 |
|
建议 SD 卡….它隐藏在 ESP32 模块下(仍然存在):-) 一些引脚不太有用——比如“门”、洪水、“雾”——它们可能(可能)被重新编程并用作4th-axe. 不知道STEP引脚上的输出信号是仅由软件实现还是使用一些内部硬件,任何引脚都可以用于此任务。步进引脚上大约有100kHz。 |

@JackHouseLab那太好了。 |
|
看起来你在 step 和 dir 线上有驱动晶体管。他们向上拉还是向下拉?如果它们拉低,附近的 +5V 端口将很方便,可以最大限度地减少布线和环路面积,从而减少噪声和干扰。看起来挺好的。斯坦
|
|
是 – 驱动晶体管下拉。您可以从位于 PCB(或外部电源)中的 7805 获取 +5V,并用它来驱动光耦合器或继电器等… 这是该板的原理图: PWM 晶体管也可以由外部电源供电 – 如果有这样的需要。 |
|
看起来挺好的。我在哪里注册才能获得一个:-)?斯坦
|
|
你好, 我更喜欢设计而不是销售 |
|
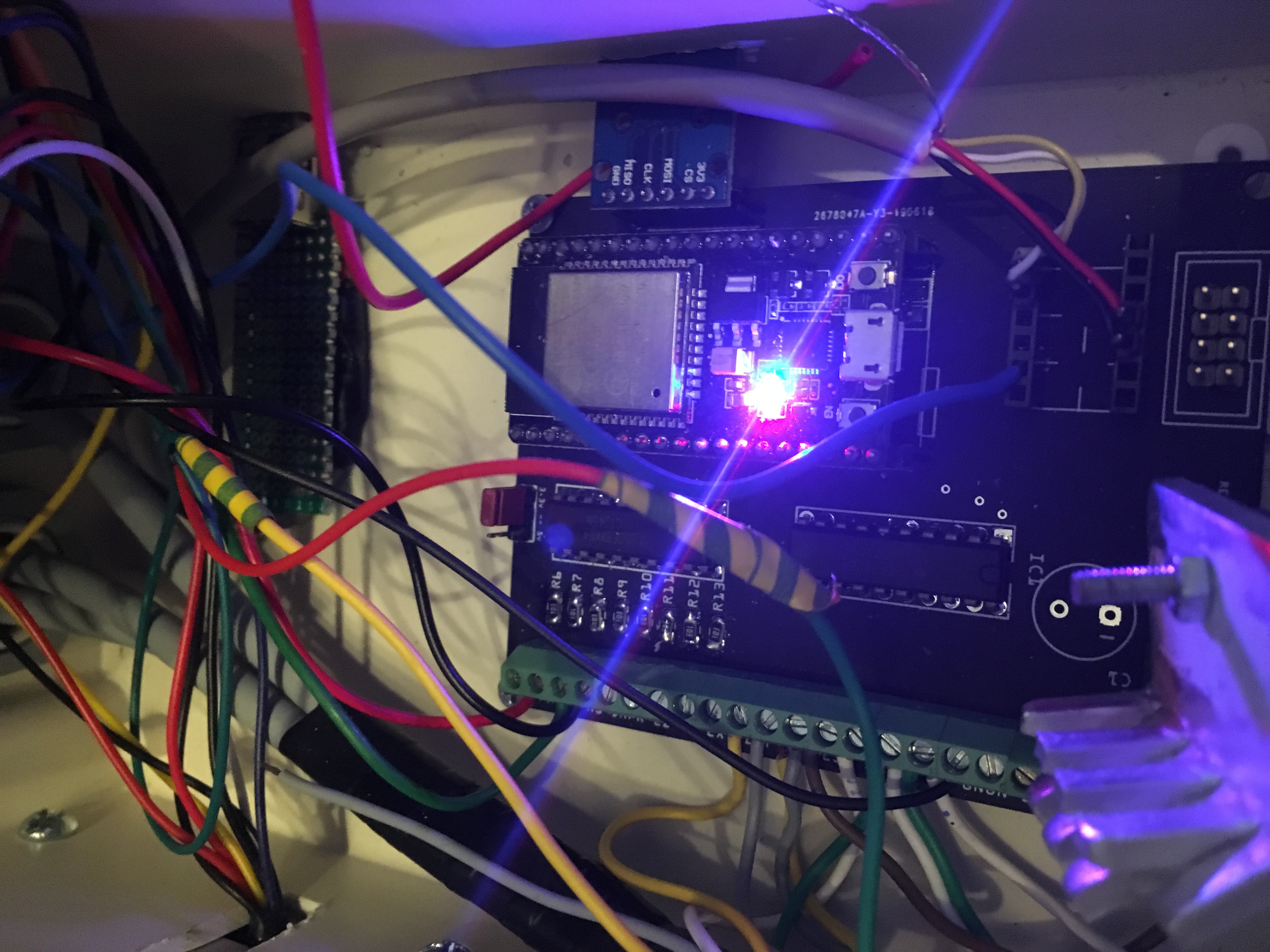
看起来不错 我的电路板是真实的: 还没有连接到机器,但我用示波器做了一些测试,一切似乎都很好。 正如我所看到的,ESP32 模块在 AP 模式下(140mA)比在 Station 模式下(大约 70-80mA)消耗更多的电流。 现在是时候用新的替换旧的 arduino grbl 控制器,并检查它是如何工作的:-) |

|
谢谢 :-) 我连接到机器,但归位有问题(设置与原始 grbl 相同)- 移动约 2 毫米后我收到这样的消息: 将牵引设置增加到 200(从 2)后,移动是连续的(用于 X 归位)并且限位开关不起作用,只有手动复位才使我免受机器损坏。 Is something missing (commented out) in the compilation? Edit: |
|
It is good to check the limit switches manually by looking at the ? response. |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
我正在为一些即将推出的功能开发测试 PCB。
正在处理的功能…
这只是一个试验台,用于尝试可能会或可能不会进入 master 分支的新功能。