

评论
最有可能的原因是在将联动支持添加到电机插件时没有删除测试。尝试删除线条。 |
|
你好@jevermeister,您是否设法让联动电机在 skr 2 上工作? |
你好, 我没有 SKR 2,而是 Rumba32。由于两者都为 Trinamic 驱动程序使用 UART 模式,我假设如果它有效,它将适用于两个板。但是目前我仍在构建我的 MPCNC,还没有切换到 grblHAL。所以我不知道,抱歉。 |
|
@WellDone2094删除我提到的行后它对你来说失败了吗? |
|
@terjeio没有这些行编译很好,但我仍在等待交付的电路板进行测试。 |
不 – 不要更改这些符号 – 配置应该在my_machine.h中完成,预处理器会整理出其余部分。 |
|
哦,我没看到那个文件,那更容易,我会试试的。谢谢 |
|
我可以确认它可以编译,这个周末我应该可以在板上测试它。 |
|
你好@terjeio, 然后我用命令`pio run –environment btt_skr_2_tmc2130 构建了固件。 有什么建议么? |
|
你用 SD 卡(引导加载程序)刷写?如果是这样,请检查此评论。 |
|
谢谢,工作!并且联动+自动平方工作! |
|
一切似乎都在工作,但 iosender/grblhal 经常冻结,我认为固件存在一些问题,因为重新启动 ioSender 无济于事,但重置电路板可以解决问题 |
|
再次闪烁后,它似乎更加稳定。 |
发生这种情况时,您可以使用 PuTTY 等终端程序进行连接吗?通过键入来自实时报告请求的任何响应
我检查了两个未标记的步进器,我认为它们是 1.8 度/步并且旋转与设置一致。我将 steps/mm 设置为 200,并在检查时发送命令移动一圈。 |
|
在 iosender 冻结后,我厌倦了使用腻子连接到电路板,但它没有连接。我还尝试拔下并重新插入电路板以确保没有任何东西在使用该端口,但是当我将其插入电脑时无法识别它。重置后一切正常,我可以毫无问题地使用腻子连接到它。我可以做些什么来调试它吗?调试模式,以不同于 usb 或其他任何方式的连接方式? |
|
关于步进/毫米,我使用的是 1.8 度电机,带 16T 皮带轮和 gt2 皮带,这应该有 100 步/毫米,但如果我想正确移动,我需要使用 50。skr 2.0 与 tmc 2209 |
好的,那么很可能控制器由于某种原因崩溃了,一个错误或电气干扰?仅供参考,我昨天用 F446 板进行了 3 小时的测试,没有出现问题 – 今天晚些时候将进行更长的测试。
如果没有调试器,您的选择是尝试使用不同的 USB 电缆,绕过任何 USB 集线器或通过 UART <> 分线板连接绕过 USB 板。挂起需要很长时间吗?闲置时会发生吗?主轴什么时候启动?……?
将 steps/mm 设置为 200,将微步设置为 16 并将轴移动 16mm – 电机转一圈吗?我为我做了。 |
我试过了,步进器在这里转
它似乎是随机的,有时在 30 分钟后的某个时间它仍然工作需要 2 分钟才能崩溃。 今天我将使用不同的电缆,看看是否有帮助。 感谢您的支持 |
|
是否 |
这是 M122 输出。
我认为这是电缆问题,我换了一根短电缆,从那以后它就没有崩溃过。对不起误报 |
|
我刚刚提交了重构的 TMC 软 UART 代码,希望现在可以使用。由于我没有 SKR 2.0 板,我无法用它验证代码,但已经用 F446 Nucleo 板和两个 Watterot TMC2209 模块对其进行了部分测试。 |
|
我今天晚些时候会测试它,我得到了一个 st-link v2 如果它可以帮助识别问题 |
|
我刷新了新版本并再次运行 M122,这次它成功了,我得到了这个输出 我尝试设置 step/mm=200 并移动 16mm,但步进器仍转 2 圈 |
|
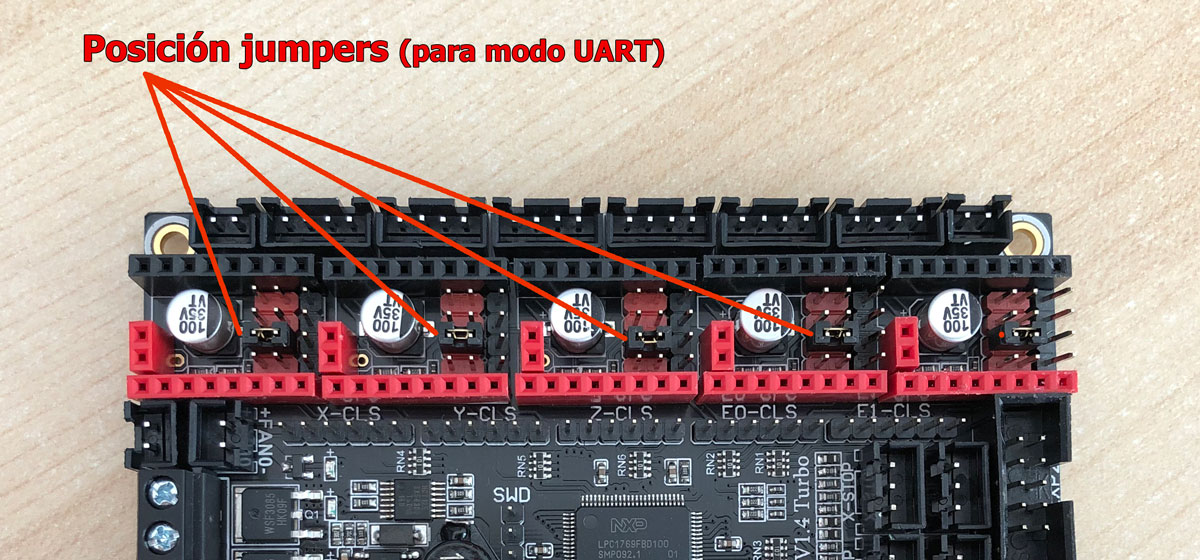
确保移除 MS1 和 MS2 上的跳线。TMC2209 的 UART 引脚上应该只有一个。 |
|
司机下面只有一根这样的跳线 |
|
我将每个轴设置为不同的电流,这似乎有效,但是当我将 Y 轴设置为 8 微步时,所有干燥器都更改为 8。移动 16 毫米,8 或 16 微步保持 50 步/毫米产生相同的结果。步进器旋转相同的量。 重置电路板后,所有驱动程序都回到 16 微步,即使 grblhal 显示 Y 轴为 8 |
|
Do you have an oscilloscope? I wonder if this somehow is related to the motor power circuitry on this board. In my test setup a |




{kind=link}
{kind=link}
我目前正在将 grblHAL 移植到具有 UART 模式的 BTT Rumba32 板,用于我将要使用的 TMC2209。
我读了 SKR 2.0 驱动程序文件
#if TRINAMIC_ENABLE && N_GANGED > 0
#error “BTT SKR-2 不支持带有 Trinamic 驱动程序的联动电机。”
#万一
然而 SKR 1.1 驱动程序没有这样的限制,尽管两个板都支持 UART 模式。
你能说出 SKR 2.0 不支持带 Trinamic 驱动器的联动电机的原因吗?所以我在我的 Rumba32 端口上尝试这个之前就知道了?