

评论
|
您好, |
方向反转 #259")
|
这两个值将作为变量#GMAS (Graphic MAX S) 或#GMIS (Graphic MIn S) 用于自定义按钮 |
方向反转 #259")
谢谢 – 关于找到正确的 PWM 值的任何提示,还是只是增加 1 并测试每种可能性的情况? |
|
这取决于您的 grbl-setup:$30 和 $31 设置定义了可能的最大值和最小值 – 默认最大值为 1000(https://github.com/gnea/grbl/wiki/Grbl-v1.1-Configuration#- –view-grbl-设置)。 |
感谢您的信息 我让它与个人设置一起工作 但现在它在绘图过程中丢失了串行通信 我会看看你发送的内容,以防我的方法导致通信中断 |
方向反转 #259")
方向反转 #259")
|
所以你需要设置Z轴?奇怪,你的伺服是怎么连接的?因为你写了“我试过调整伺服方向”……
|
方向反转 #259")
方向反转 #259")
我对此有点陌生,所以仍在学习并且可能正在做一些愚蠢的事情 我正在使用带有真正的arduino uno的cnc arduino shield(红色pcb)。伺服连接到 5v 和 gnd,数据连接到 Z+ 我尝试了您在视频中使用的方法,但没有值触发任何笔移动 |
方向反转 #259")
我使用的是 10A 台式电源和屏蔽随附的电缆,但 如果我再次“打开”通讯” |
方向反转 #259")
|
我切换回使用 zaxis,它似乎在工作(正确的笔位置) |
方向反转 #259")
|
关于通讯中断,我只是注意到其中一个步进电机正在运行 v 热(即使驱动器没有并且 PSU 仅为两个 nema17 步进电机和板绘制 800w)但想先检查一下 谢谢 |
|
您的 arduino 上必须有一个特殊的 grbl 版本:未安装 z 轴的驱动程序,但您需要发送 z 命令来激活您的伺服… |
|
谢谢 Sven 我想我正在运行 grbl 的 eggbot 版本。你推荐我为你的 grbl-plotter 程序使用哪个版本。- 它是帮助页面上的伺服版本吗?从我的 Galaxy 发送 ——– 原始消息 ——– 来自:Sven ***@***.***> 日期:07/03/2022 07:45 (GMT+ 00:00) To: svenhb/GRBL-Plotter ***@***.***> Cc: autofrank ***@***.***>, 作者 ***@***.** *> 主题:回复:[svenhb/GRBL-Plotter] 笔(上/下)方向反转(问题#259)你的arduino上必须有一个特殊的grbl版本:z轴的驱动程序没有安装,但你需要发送z命令来激活你的伺服……使用“Check grbl”程序读取$-settings和检查数字是否正常。例如,一个数字不合适,如果您将步进/毫米数设置为 100 美元,并且还允许以 110 美元的速度运行高速,则 arduino 的速度不足以产生步进脉冲和不确定的行为出现 – 我遇到了这个陷阱并且有连接错误…… – 直接回复这封电子邮件,在 GitHub 上查看它,或者取消订阅。使用适用于 iOS 或 Android 的 GitHub Mobile 随时随地分类通知。您收到此消息是因为您是该主题的作者。消息 ID:***@***.***>
|
|
是的,我会推荐我知道的版本 (grbl_v1.1f_Servo.hex)。 |
|
谢谢,我尝试上传您在上面引用的版本(.. servo.hex)但是 X-Loader 挂起并且不会执行上传您有我可以通过 arduino IDE 上传的版本吗?我在 git 上使用了 grbl 的 eggbot 版本。稍后我在家时会找到确切位置并发布。从我的 Galaxy 发送 ——– 原始消息 ——– 来自:Sven ***@***.***> 日期:07/03/2022 11:30 (GMT+ 00:00) To: svenhb/GRBL-Plotter ***@***.***> Cc: autofrank ***@***.***>, 作者 ***@***.** *> 主题:回复:[svenhb/GRBL-Plotter] 笔(上/下)方向反转(问题#259) 是的,我会推荐我知道的版本 (grbl_v1.1f_Servo.hex)。另一方面,现在您了解了您的版本是如何工作的——只需保留 z 轴的复选标记。您从哪个位置下载您的版本?我不想检查是否还有其他陷阱…… – 直接回复此电子邮件,在 GitHub 上查看它,或取消订阅。使用适用于 iOS 或 Android 的 GitHub Mobile 随时随地分类通知。您收到此消息是因为您是该主题的作者。消息 ID:***@***.***>
|
|
也可以通过 arduino ide 上传十六进制文件(但看起来有点复杂)。 |
|
方向反转 #259")
|
@svenhb 我卸载了我拥有的 grbl-plotter 版本,并从https://github.com/svenhb/GRBL-Plotter/releases/tag/v1.6.5.2下载了最新版本的 Grbl-plotter 版本 1.6.5.2 无法使 PWM 伺服工作
笔再次朝相反的方向前进 第 55 行 – 这是下笔的 gcode(但这里的正确动作应该是抬起笔) 所以看起来 gcode 是用相反的方式生成的 – 不确定是什么控制了 raise v lower 我可以逆转这个机制,它会,但一切都会逆转.. 有什么想法吗 ?
关于通讯失败, 更新:换掉电机,它在关闭通讯并停止之前完成了大约 75%。新电机不发热,还更换了不同的电源。我需要继续搜索这个 |
方向反转 #259")
方向反转 #259")
方向反转 #259")
如果有一个真正的 Z 轴,我会说:你需要调整 $3 并反转方向:https ://github.com/gnea/grbl/wiki/Grbl-v1.1-Configuration#grbl-settings
您是否尝试为单个命令设置“-2”表示抬笔和“2”表示落笔?
我很困惑……你有伺服还是真正的 Z 轴?也许你可以拍一张你的机器的照片?
也许你可以发送日志文件?位置:检查数据路径所在菜单中的关于窗口。 |
|
这是我的设置。两个 Nema 17 步进电机(X 和 Y)、CNC 屏蔽和 DRV8255 驱动器。- Z 轴伺服 ( 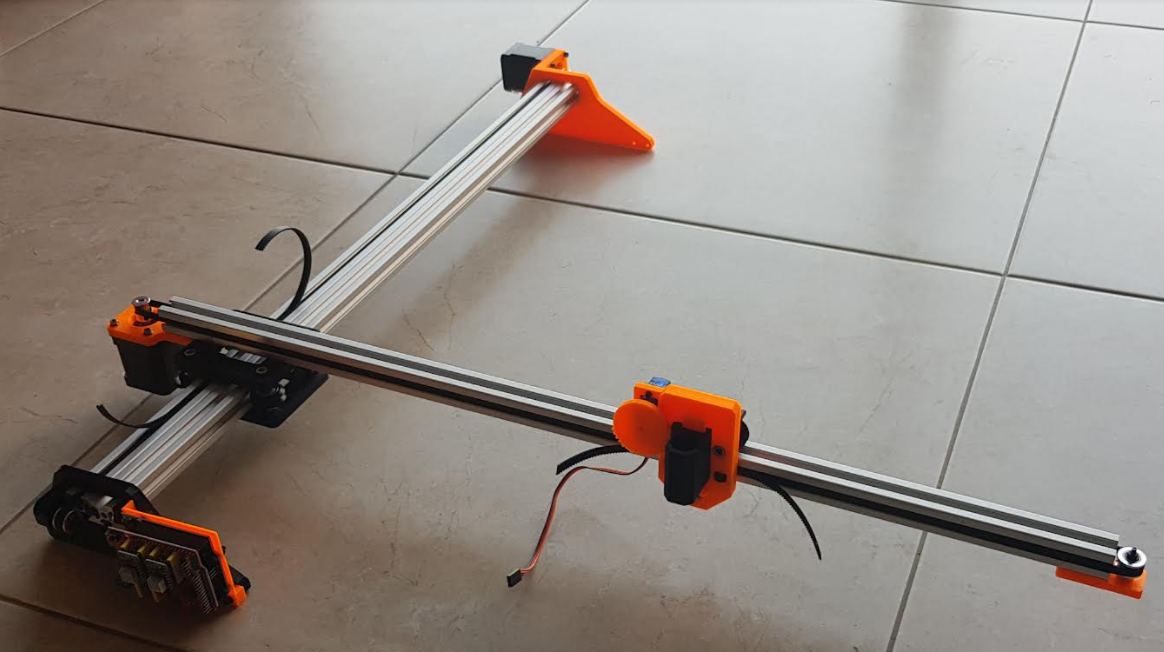 您是否尝试为个别命令设置“-2”表示抬笔和“2”表示落笔?试过了,但没有区别你有伺服还是真正的 Z 轴?也许你可以拍一张你的机器的照片?也许我也应该换成 Z 的步进器?我有一个小的 Nema 17 我可以使用 – 可能更接近我的 3d prnter 需要设计一个新的 z 安装但应该没问题 变热 – 就像步进器一样一直“保持静止状态”,因此变热,我可以尝试将电流保持在最大值的 33%(可能约为 0.5 伏),看看它是否能改善热量并保持所需的扭矩,我也可以更换司机,看看它是否留在电机上我稍后会检查日志文件并发送
|
|
顺便说一句:普通的 RC 伺服在移动时会消耗大量电流。因此我也遇到了问题,并为伺服器添加了一个单独的电源(一个 5V 稳压器 7805,由 12V 电源供电)。 |
更新 – 我反转了 Pen up / down 各个命令,现在可以正确生成 gcode 更新 2 – 切换到从单独的电源为伺服器供电,我仍然有一个 Comm 故障 更新 2 感谢所有的帮助 |
|
您的固件有奇怪的行为,但可以解决。这不是 GRBL-Plotter 中的错误。 |




{kind=link}
嗨
,我有一个标准设置,并且浏览了所有维基,但找不到解决方案。很抱歉,如果这是一个简单
的命令,在笔上/下命令(自定义按钮)中的作用是相反的。我尝试在 grbl 中调整伺服方向但没有影响
如果我运行示例 svg (grbl_graphic_popup) 之一,它一切正常,除了笔在应该完成时竖起(和 visa vesa)
我从工具台运行并尝试调整笔的设置但看不到任何机会,但 TBH,我真的不知道所有设置的作用(附加当前设置)
有没有办法逆转笔的操作
谢谢
方向反转 #259")
。 坦率